1.3.1. Softwaretypen#
Es gibt verschiedene Softwaretypen, die Sie als zukünftige Ingenieure sowohl
anwenden
und/oder auch selbst entwickeln (d.h. programmieren).
1.3.1.1. Beispiel: Software zur Erstellung von CAD-Geometrie (Python-Programmierung)#
FreeCAD ist eine Software zur Erstellung von Geometrie - ähnlich wie CATIA, das Sie im Rahmen einer anderen Vorlesung kennenlernen werden.
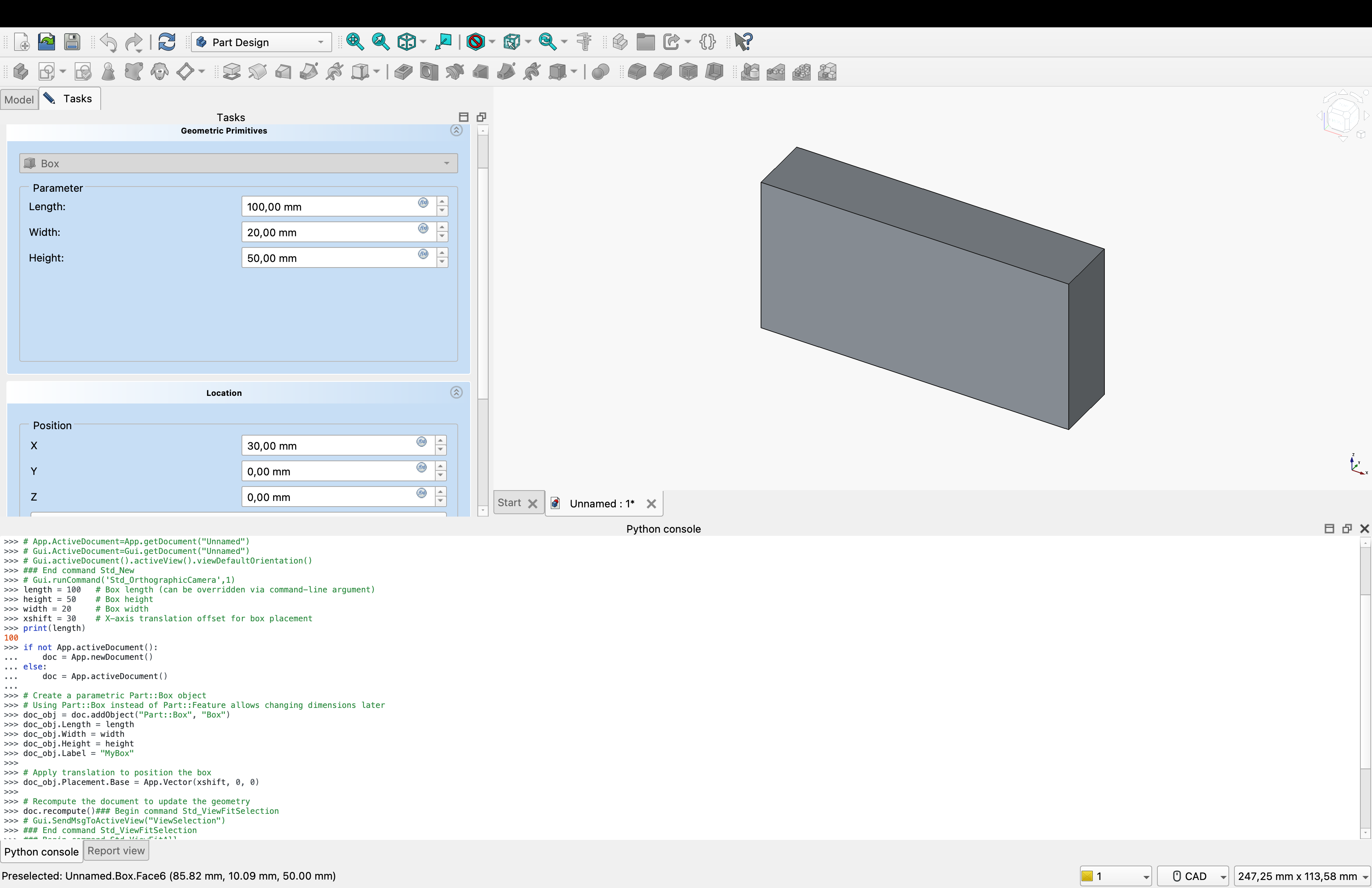
Abb. 1.10 Beispiel: CAD-Geometrieerstellung in FreeCAD (automatisierbar mit Python).#
Sie können in FreeCAD Geometrie einfach über das Klicken der entsprechenden „Knöpfe im Menü“ erzeugen
Jeder „Knopfdruck“ erzeugt im Hintergrund aber eigentlich nur einen Python-Command.
Beispiel: Einfache Box
# ============================================================================
# FreeCAD Document and Object Creation - COPY the following command
# into the FreeCAD GUI to create the box
# ============================================================================
if not App.activeDocument():
doc = App.newDocument()
else:
doc = App.activeDocument()
# Create a parametric Part::Box object
# Using Part::Box instead of Part::Feature allows changing dimensions later
doc_obj = doc.addObject("Part::Box", "Box")
doc_obj.Length = 100
doc_obj.Width = 50
doc_obj.Height = 70
doc_obj.Label = "MyBox"
# Apply translation to position the box
doc_obj.Placement.Base = App.Vector(xshift, 0, 0)
# Recompute the document to update the geometry
doc.recompute()
Das bedeutet für uns:
wenn wir ein wenig Python verstehen, können wir uns das „Knöpfe drücken“ sparen.
Stattdessen schreiben wir Code, der die Geometrie automatisch (und viel schneller) erzeugt.
1.3.1.2. Beispiel: Software für einen Laufroboter (Programmiersprachen: Matlab, C)#
Im Laufe Ihres Bachelorstudiums an der FK03 haben Sie ein Fach namens „Projektmodul“.
Wir (Berghammer, Ertl, Mayr, Mehlert, Muhl) haben beispielsweise einen Laufroboter entwickelt (Sommersemester 2017).
Das Bewegungsverhalten haben wir vorher simuliert - in der Programmiersprache Matlab.
Die eigentliche Programmierung des Bewegungsverhaltens (Laufen, Hindernis ausweichen) erfolgte dann in der Programmiersprache C.
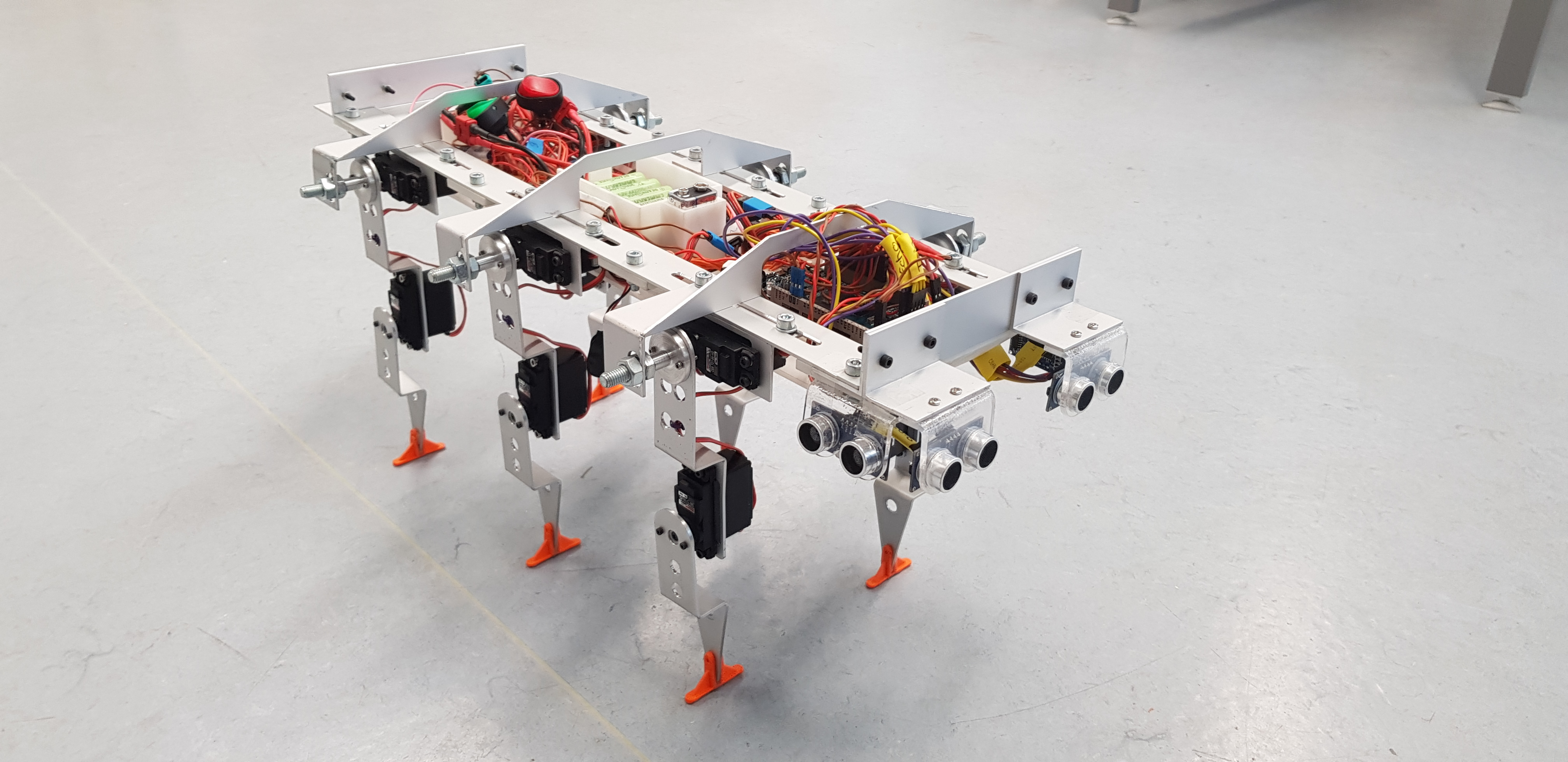
Abb. 1.11 Laufroboter (Projektstudium HM FK03, SoSe 2017). Privates Foto, Christina Maria Mayr.#
Abb. 1.12 Laufroboter in Bewegung. Privates Video, Christina Maria Mayr.#
1.3.1.3. Übersicht über Softwarearten#
Die folgenden Softwaretypen werden unter anderem von Ingenieurinnen (mit-)entwickelt:
Eingebettete Systeme (embedded software) – z.B. Flugregelung, Laufroboter
Datenerfassungssysteme – Beispiel: Air Data System
Systeme von Systemen – z.B. Air Traffic Management System: Flugzeug, Tower, Luftraum und Infrastruktur
Eigenständige Anwendungen (stand-alone) wie Systeme für Modellierung und Simulation – z.B. Geometrieerzeugung (FreeCAD, CATIA), Bauteiloptimierung (optiSLang)
Abb. 1.13 Software kommt überall vor und es gibt verschiedene Typen#
Daneben gibt es weitere Softwaretypen, bei denen Ingenieurinnen und Ingenieure weniger häufig entwickeln (sondern nur anwenden):
Interaktive transaktionale Anwendungen (z.B. Amazon)
Stapelverarbeitende Software (batch processing) – Lohnauszahlungssysteme
Unterhaltungssysteme – Beispiel: Computerspiele
Wie ein Softwareprodukt entwickelt wird, hängt stark vom Softwaretyp ab.
Hinweis
Die Einteilung der Softwaretypen ist nicht trennscharf!